



Objectives
-
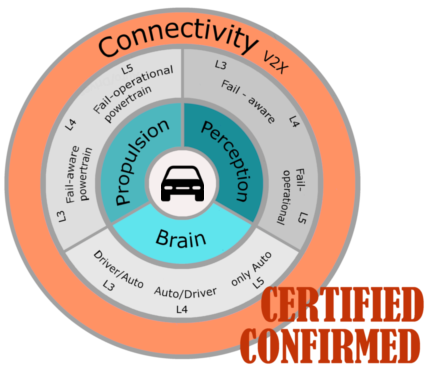
The trade-off between safety and security cause the need to restructure the vehicle architecture significantly from SAE Level 3 on. ArchitectECA2030 addresses today’s challenge of closing the gap between continuous integration of methods, tools, and processes for automated driving functions and the need for the continuous approval of these safety-critical functions (ASIL).
- 1
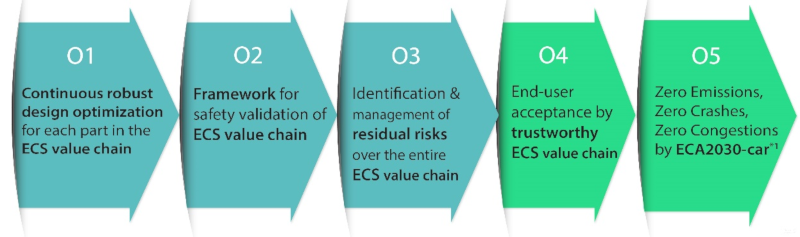
The Objectives of Architect ECA 2030 are represented in a chain and aim to strengthen Europe’s position in the fields of safe and reliable electronic components and embedded intelligence.
Objectives 1 to 3 represent the group of technical objectives for addressing the ECA vehicles challenges:
- a continuous and robust design optimization
- framework for safety validation
- identification and management of residual risks.
Objectives 4 and 5 highlight the contributions to economic and societal challenges
- acceptance of ECS
- zero emissions, zero crashes, zero congestions.
ArchitectECA2030 aims at developing a semiconductor-centric ecosystem of innovation in terms of reliable, robust, and fail-aware ECS for ECA vehicles beyond the state-of-the-art and viable technologies to increase the attractiveness of ECA vehicles by translating customer requirements and concerns into a value proposition. The methods, tools, technologies and applications are developed along the entire value chain in tandem.
|
The stringent implementation is driven by the spirit of a cross-skilled consortium of European partner across the ECS value chain. |